
Frequently Asked Questions – Instruments
I have just installed an HF GPS and now I have a "Collision bus" message, what should I do?
Before installing this GPS you probably had a standard GPS connected to an NMEA input on your system. This NMEA input has been initialised and GPS channels created. The HF GPS also creates GPS channels on the bus, hence the collision and error message.
Solution:
- Disconnect the HF GPS and the standard GPS.
- Power up the system and initialise the NMEA input where the standard GPS was connected again. The result should be “O channels created”. This will clear this NMEA input.
- Turn off the power and reconnect the HF GPS and the standard GPS.
- Power up the system again and then start a route to a waypoint. Then do an NMEA initialization. This will create GPS channels that are not provided by the HF GPS such as course deviation or heading and distance to waypoint.
I have lost my true wind and ground speed code, what can I do?
This code is calculated with the serial number of your pilot computer (Gyropilot 2). We maintain a database of delivered codes, so you can ask us by e-mail.
The serial number is composed of 4 hexadecimal characters (from 0 (zero) to F). You can find it on a label stuck on the ECU (see image below) or via the menu of your pilot order.
- For the Gyropilot Graphic: Main menu > Configuration > Owner code > Options.
- For the Multigraphic: Main menu > Pilot > True wind option > True wind code.

The serial number here is 0EAF
My AIS receiver or transponder is connected to my Multigraphic but I can't see the AIS page. How do I do this?
You can first check that the AIS data is coming into the Multigraphic via the console: Main Menu > Settings > Maintenance > Devices > Console. You should see sentences that look like:
!AIVDM,1,1,,A,14eG;o@034o8sd<L9i:a;WF>062D,0*7D !AIVDO,1,1,,B,13PRrB0000OvbS@NhA9=oPbr0<0u,0*5
If this is not the case you need to check your physical installation. If you see these sentences you need to activate the AIS page of your Multigraphic: Main menu > Displays, then select a free customizable screen. Choose “Screen Type”, scroll down to “AIS”. Select “visible” to get a green tick instead of a red cross. The page is now available. You will also need to have a compass and GPS data on the bus.
I have just installed a WiFi Box (or USB Box) but I can't get any NMEA information back. What is the problem?
For NMEA information to enter an nke bus, the corresponding input must be “initialized”. This initialization corresponds to the creation of channels on the bus. On a WiFi Box or USB Box, the initialization is done using a capacitive button. You leave your finger on this button for 3 seconds* (3 beeps) while the device in charge of sending the NMEA data (plotter, GPS, PC, tablet or mobile) is actually transmitting data. The NMEA input (WiFi (UDP 50000), USB or RS232 (4800 to 38400 bauds)) will then scan the received data for 20 seconds. If these data correspond to an available channel on the bus, the channel is created and the WiFi or USB Box will be able to broadcast these data. At the end of the procedure 1 beep per channel created is emitted (listen carefully!). If the procedure fails, check that the data you want to be transmitted is not already created on another NMEA input, in which case the channel is not available.  *Other initialisation possibilities exist, please refer to the manual.
*Other initialisation possibilities exist, please refer to the manual.
What is the "true wind/speed over ground" option?
True wind calculation
The true wind calculation is based on 3 measured data: surface speed (Vb), speed (Va) and apparent wind angle (Aa). 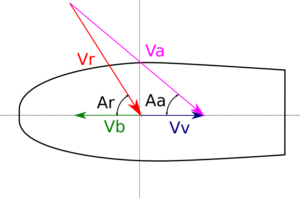 True wind speed: Vr = (Va2 + Vb2 – 2 Va Vb cos Aa)½ Actual wind angle: Ar = Aa + arcsin(Vb sin Aa / Vr)
True wind speed: Vr = (Va2 + Vb2 – 2 Va Vb cos Aa)½ Actual wind angle: Ar = Aa + arcsin(Vb sin Aa / Vr)
Surface speed reference
There are many reasons why a good surface speed measurement is not possible:
- The sensor (loch/speedo) may be dirty. This is often the case with paddlewheel sensors that are left in place. It should be removed from its hull when not sailing. But this is a tedious exercise.
- A boat does not sail on its axis (drift), and the hull deflects the water streams. These deviations change with the heel. The hull also creates a disturbed layer called the “boundary layer” where the water is slowed down by friction on the hull surface. Depending on the level of electronic equipment, the sensor can be calibrated with a simple coefficient or a complete table that includes the tack and heel. An ultrasonic measurement (Ultrasonic Speedo) can be used to measure outside the boundary layer and thus remove a bias.
- Some light displacement boats have a part of their hull coming out of the water when planning. It is then difficult to find an area of the hull that will always be in the water. Most of the time the log/speedo is installed forward of the keel. It is not uncommon for this area to come out of the water in the event of a plan, as the sensor becomes inoperative. It is then possible to install 2 side sensors in the rear third of the boat. An automatic sensor selector will switch from one sensor to the other according to the tack.

©Th.Martinez/Sea&Co. LA TRINITE SUR MER – – FRANCE 20 mai 2014. Départ de la course en solitaire La MINI en Mai, organisé par la SNT. MONOHULL, MONOCOQUE, MINI EN MAI, 865, CULTISOL, Davy Beaudart
The bottom speed is not subject to these disturbances and therefore offers us a more robust source. When it comes to sailing under pilot in true wind mode, this robustness of the speed source becomes essential. If the boat speed (Vb) drops to 0 knots the true wind angle (Ar) is equal to the apparent wind angle (Aa). Let’s imagine the following situation:
- Apparent wind angle 140°
- Apparent wind speed 12 knots
- Boat speed 15 knots
The actual wind is calculated to be about 25 knots for an angle of 160°. If the speed falls to 0, the new true wind angle will be 140° (equal to the apparent wind) and the pilot will pull the helm back to the starting set point (160°), i.e. 20° of headway. The boat slows down and the apparent wind angle increases, so the pilot pushes the bar back to luff. This becomes a bit chaotic. A boat’s polars are based on a surface speed reference, so this calculation based on bottom speed is useful for the pilot but not for measuring performance. When cruising it is also a very interesting speed reference.
SOG – Speed Over Ground
How to obtain a true wind calculation based on ground speed when equipped with nke instruments? You have to replace the surface speed by the ground speed on the bus. It is the log/sounder interface (ILS) that provides this surface speed. When you have a modified ILS version 2.1, if you select “speed reference: bottom” in the pilot settings, the ILS will feed the surface speed channel with the bottom speed it receives via the bus. To check that this is working there is a simple procedure that can be carried out at the pontoon:
- Set the surface speed filter to 1. This allows the raw data to be read without delay.
- Select the surface speed and bottom speed channels on a display. Even at a standstill a bottom speed different from 0 is always observed.
- If you have selected the surface speed as a reference in the driver you must read a surface speed different from the bottom speed.
- If you have selected the bottom speed as a reference in the driver you must read identical data on both channels with a possible small time difference.
 Caution Calculating a true wind angle from a bottom speed requires a reactive, high frequency, low latency source. The most suitable sensor is therefore the HF nke GPS.
Caution Calculating a true wind angle from a bottom speed requires a reactive, high frequency, low latency source. The most suitable sensor is therefore the HF nke GPS.
How do I change the batteries in my remote control (my transmitter)?
In order to guarantee the watertightness of our transmitters, the cases are glued, it is impossible to open them without destroying them. We therefore carry out this change of case and battery in our workshops. You must send it to us together with a letter containing all the necessary contact details (e-mail, postal address for return, telephone). The delay does not exceed one week including transport for metropolitan France.  The shipping address is: nke Marine Electronics 6 rue Gutenberg 56700 HENNEBONT – France Tel.: +33 297 36 10 12 e-mail: info.marine-electronics[arobase]nke.fr How often should I change the battery? This depends on your use and there is no indicator to show the level of charge of your battery. For intensive use, you should expect 3 years of autonomy, for normal use it can be up to 10 years. Activating the MOB monitoring consumes a little more power than simple remote control use. The transmitter does not consume any power outside of button presses or MOB monitoring, there is a very low self-discharge of the battery. In case of a special event such as an ocean crossing or a long cruise it is advisable to change the battery if the transmitter is older than 3 years. It would be a pity if it were to fail during this event.
The shipping address is: nke Marine Electronics 6 rue Gutenberg 56700 HENNEBONT – France Tel.: +33 297 36 10 12 e-mail: info.marine-electronics[arobase]nke.fr How often should I change the battery? This depends on your use and there is no indicator to show the level of charge of your battery. For intensive use, you should expect 3 years of autonomy, for normal use it can be up to 10 years. Activating the MOB monitoring consumes a little more power than simple remote control use. The transmitter does not consume any power outside of button presses or MOB monitoring, there is a very low self-discharge of the battery. In case of a special event such as an ocean crossing or a long cruise it is advisable to change the battery if the transmitter is older than 3 years. It would be a pity if it were to fail during this event.
Frequently Asked Questions – TopSailor Software
TopSailor remains stuck on the homepage

Solution :
- Check your Internet connection
- If you are using a proxy, check that it is able to communicate with the nke servers (nke-marine-electronics.fr & compte.nke-marine-electronics.fr)
- Try to restart TopSailor by connecting to another network
- Restart TopSailor without being connected to a network
TopSailor does not connect to my nke box

Solution :
- Click on the “Connect” button
- Double-click on the name of the box
The datavars.dat error appears even when connected to the Internet

Solution :
- Open the registry editor and go to the location Computer\HKEY_CURRENT_USER\SOFTWARE\nke\Common. Change the value of the Databasepath variable to C:\ProgramData\nke\Database
The identification of instruments never ends

Solution :
- Go to the Settings tab –> Connection and click on the Logout button. Restart the detection and reconnect to your box.